LINX for Linux User's Guide
- Overview of LINX Communication
- Description and Main Features of LINX
- LINX Protocol
- Install LINX in Linux
- Build LINX from the Source
- Quick Start Using LINX Remote Links
- Create and Supervise LINX Links to Other Nodes
- Examples - Using LINX with Applications
- Reference Manuals - LINX for Linux
- LINX Configuration
- Other Links and Documents
- Document History
Copyright © 2006 Enea Software AB.
LINX, OSE, OSEck, OSE Epsilon, Optima, NASP, Element, Polyhedra
are trademarks of Enea Software AB.
Linux is a registered trademark of Linus Torvalds.
All other copyrights, trade names and trademarks used herein are the property of their respective owners and are used for identification
purposes only.
The source code included in LINX for Linux are either copyrighted according to GPL (see COPYING file) or
according to a BSD type copyright - see copyright text in each source file.
Disclaimer. The information in
this document is subject to change without notice and should not be construed
as a commitment by Enea Software AB.
1. Overview of LINX Communication
Enea LINX is an open technology for location transparent inter-process
and intra-node message passing communication for distributed systems,
e.g. clusters and multi-core real-time environments. It is platform
and interconnect independent with high performance, scaling well to
large systems. It is based on a well known transparent message passing
method, used for many years by Enea Software AB in the OSE family of
real time operating systems.
2. Description and Main Features of LINX
The LINX for Linux is an open source implementation of the LINX
inter-process communication protocol for distributed heterogeneous
systems. LINX for Linux currently contains support for the Ethernet
inter-node transport media and other media will be added.
LINX for Linux includes the loadable LINX kernel
module, the user-space LINX API library
and command tools for configuring and supervising
inter-node communication using LINX.
LINX supports location-transparent and platform-transparent
inter-process communication. Applications use the same API,
independent of where the communicating peer is located.
Peer processes can be in the same node, handled by the same
CPU or another CPU in a multi-core system, or processes can
be in other nodes, whether part of a cluster or independent,
reachable via a suitable transport mechanism. The protocol
is specified to allow different operating systems to
communication transparently.
Scalability and real-time performance means that the protocol
is designed to be robust and predictable, but still lightweight
to avoid overhead and be highly scalable upwards or downwards,
while keeping high performance and a small footprint. LINX is
used on DSP's with little memory available as well as on large
servers in large networks with many nodes. This scaling is easy,
as LINX dynamically builds address maps to peers, node links and
processes at run-time and only maintains connections and links
which are actually used in the node. Clusters can be configured
to limit LINX communication to a group of systems.
The LINX protocol is also supported by Enea's OSE / OSEck family
of real-time operating systems for small and large systems.
LINX Communication
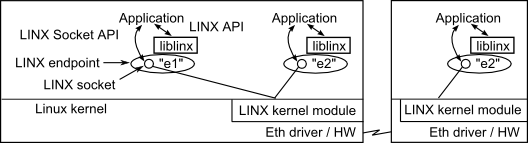
In LINX for Linux, an application ordinarily uses the LINX API.
The application is linked with a the liblinx.a LINX library and uses
functions calls to communicate. This hides the underlying communication
protocols. Each application process or thread creates a LINX
endpoint, owning a LINX socket and connected to the LINX kernel
module. All communication are through this LINX endpoint. This socket
is of a special type (PF_LINX). LINX messages and notifications
are asynchronous and can arrive at any time.
A lower level LINX Socket API is also available to be used
if needed, e.g. when an application wants to simultaneously wait for
multiple events with select(2), without looping and polling.
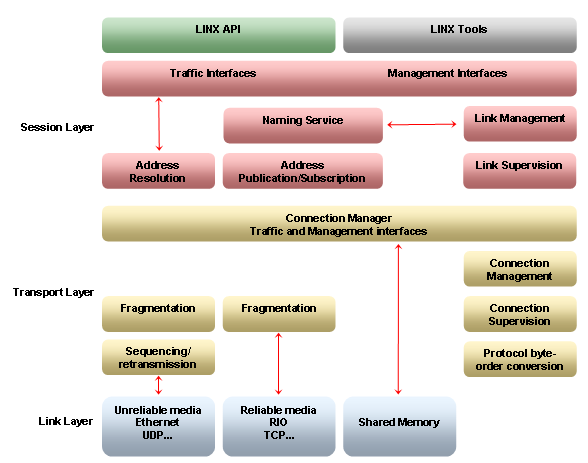
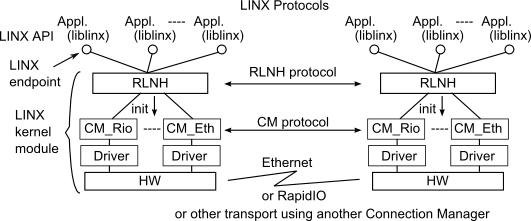
The LINX protocol, used by the LINX kernel module, has two main levels,
RLNH and CM. RLNH is generic and handles logical LINX
connections and supervision within and between nodes.
CM provides a reliable transport. If the underlying transport
is non-reliable, e.g. Ethernet, CM needs to provide reliability.
Dynamic Discovery of Peers
Dynamic discovery allows applications to find peers by name and be
asynchronously notified when the peers appear; this is called hunting
for a peer.
The notification arrives with a local identifier, often called spid,
to be used by the application as a handle to the peer, independent of name
or location or any ID used in a remote node.
Peers can be on the same node or on remote nodes. To hunt for remote peers,
the name shall include the name of a LINX link to reach the remote node.
|
|
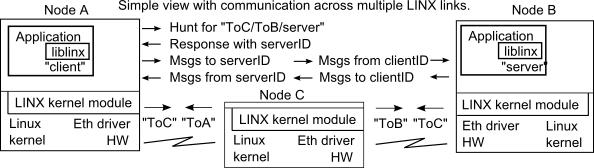
Sequence, assuming client "e1" in A wants to talk to
server "e3" in B:
|
1. Hunt for "LinkToB/e3"
2. Response with spid, e.g. IDe3
3. Attach to IDe3 (to be notified if dead)
4. Messages to/from IDE3
5. If peer lost, get notification, maybe hunt again
The only difference, if communicating with "e2"
instead, is to hunt "e2" instead of "LinkToB/e3".
|
1. Receive message from IDe1
2. Send response to IDe1
3. Send any messages to IDe1
Neither side needs any knowledge about
the other, except the identity (spid),
included in each message.
|
|
Communication is transparently routed across a series of nodes, if a series
of link names are given before the endpoint name, e.g. "ToC/ToB/server".
Supervision of Peers
Supervision allows applications to get notified if a peer
is lost, whether it dies or a communication link to it is closed/lost.
This is called attaching to the peer. An application can again hunt for
the peer, getting a new notification as soon as it is available again,
to continue the communication.
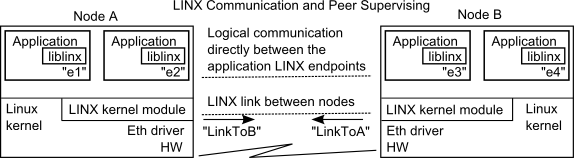
Inter-node Links - Dynamic Discovery and Supervision
Inter-node links are dynamically discovered and supervised by the LINX
discovery daemon, linxdisc. Advertisements are broadcast to allow
dynamic discovery of other nodes and automatic creation
of inter-node links. The configuration can provide limitations
to restrict which nodes are allowed, e.g. to form clusters
of LINX nodes or to allow/deny specific nodes.
Suitable link names are also configured. When a link to another node is
created with a link name, and any application has a pending hunt for a peer
via this remote link name, LINX gets information
from the other node and notifies the application when
this peer appears. LINX also supervises the remote peer via the
link, as well as supervising the link itself, to notify those
applications which have requested it, if a remote peer, or the link to it,
is lost.

LINX API and Programming Paradigm
The LINX-API provides a powerful but easy-to-use programming
paradigm, to transparently communicate with any peer
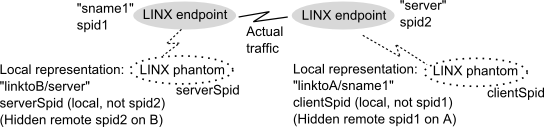
at any location. The following illustration shows the main
statements used to communicate. First both applications
create LINX endpoints, owned by the applications, giving
them names ("sname1" and "server" in the example below).
The application in node A hunts for the server, using the name
"linktoB/server". It knows the name and it know that the
server shall be on the remote side of this LINX link.
When LINX have discovered node B and they have created a link
between each other and the process in node B has
created it's LINX endpoint (named "server"), a notification
is sent to the application in node A with an identity (serverSpid)
which the local LINX in A have created. After this step, only this
identity is used, transparently and independently of the location.
The application may now
optionally attach itself to the server process, to be notified
if it is lost, and send messages to the server. Messages are always
sent in signal buffers, allocated at a LINX endpoint,
and the ownership of the buffers are transparently transferred
to the receiving endpoint.
The server needs no knowledge at all about the client, it just receives
a message, with an identity (clientSpid) locally created
by LINX in node B, and can send a response to this clientSpid.
| Linux process in node A
|
Linux process in node B |
LINX lh1 = linx_open("sname1", ....)
linx_hunt(lh1, "linktoB/server", ....)
linx_receive(lh1, &sig, &sigselecthunt)
serverSpid = linx_sender(lh1, &SIG)
linx_free_buf(lh1,&SIG);
linx_attach(lh1, LINX_NIL, serverSpid);
sig2=linx_alloc(lh1,...); // and fill with data
linx_send(lh1, &sig2, serverSpid)
linx_receive(lh1, &SIG, &sigselect)
|
LINX lh2 = linx_open("server", ....)
linx_receive_w_tmo(lh2, &SIG, ......),
clientSpid = linx_sender(lh2, &SIG)
// clientSpid is local, not spid1
// Reuse SIG for response
... Store response in SIG and...
linx_send(lh2, &SIG, clientSpid)
|
|
| A phantom with a local spid represents each remote LINX
endpoint, which has been resolved via a hunt call. Phantoms are
created on both sides, when a hunt is resolved. Lower level
connection links between nodes must previously have been created.
Applications only uses local identifiers (spid) to send/receive,
thus addressing local endpoints or phantom endpoints.
|
|
Signal Buffers
Applications communicate via LINX using signal buffers,
containing a signal number, followed by any type of data structure.
These are allocated via and owned by LINX endpoints. When a signal
buffer is sent, it's ownership is transferred to the receiving endpoint.
As endpoints are resources owned by the application, these are
automatically freed, if the application dies.
Each signal buffer includes a signal number, a 32-bit value, which is
used to indicate the type of buffer, i.e. the actual data structure after
the signal, in the signal buffer.
In the LINX API, any signal buffer structure is cast to the
generic struct pointer LINX_SIGNAL *.
Transferred signal buffers are queued at the receiving endpoint and can
be selectively received by the application. By specifying a list of signal
numbers in the linx_receive(3) call,
the application will only receive buffers with the selected signal numbers,
leaving others in the queue, for later retrieval.
The LINX protocol is used for transparent communication with
remote and local applications. Applications communicate through their
LINX endpoints and hunt for other applications by their endpoint name.
The LINX discovery daemon can automatically create remote inter-node
connections (LINX links) and supervise these, to allow
transparent communication across distributed systems. Applications
get notifications when other remote or local applications (with
LINX endpoints) become available or are disconnected or die.
In addition to the LINX protocol, there is a LINX API, with function
calls hiding the protocol details from the application.
The LINX protocol is described in a separate document (see
Other Links and Documents), but here
is a very short summary.
The protocol upper layer, the RLNH (rapid link handler) layer,
will allow applications to look up LINX endpoints by name, and will actively
supervise local and remote endpoints and send notifications when these are
disconnected or closed. RLNH relies on the lower LINX level, the CM connection
manager, to provide reliable in-order transmission of arbitrary sized messages
over any media between nodes. The RLNH is also responsible for creating and
supervising remote LINX links to other nodes. This means that it supervises
only those endpoints, local and on the remote nodes, that are known to
this RLNH and the established links.
The CM connection manager is the lower layer and needs to be aware of
and support the underlying transport mechanism. If the underlying media is
reliable, e.g. RapidIO or shared memory,
the CM can be rather simple, but with unreliable media like Ethernet,
the CM needs to provide many features, like flow control, peer
supervision, retransmission etc.
The LINX for Linux currently contains an implementation of RLNH and CM
for Ethernet.
Fetch the LINX distribution as a compressed tar file and
unpack the package at a suitable place in your Linux system.
When unpacking, a folder with the name linx-n.n.n/
is created, where n.n.n is the LINX version.
Open the file doc/index.html with a browser and read README,
RELEASE_NOTES and Changelog for the latest news about this version.
Follow the directions in this user's guide to get started using LINX
and read reference documentation. Optionally read the MAN page
versions of the reference documentation.
Other files and directories:
- Makefile, config.mk, common.mk are make files for building LINX.
- doc/ contains documentation - start reading index.html.
- include/ contains include files for LINX API and LINX Socket API.
- net/ contains the LINX kernel module.
- example/ contains LINX example applications.
- liblinx/ contains the LINX API.
- linxcfg/, linxdisc/, linxstat/ contain tools for configuring and status.
- scripts/ contains a few build scripts.
- bin/ and example/bin are created when LINX is built via make all
- example/bin/ is also created if examples are built via make example.
After building LINX, the main files to use are:
- linx.ko is the LINX kernel module.
- liblinx.a is the LINX API library.
- Commands: linxdisc, linxcfg, linxstat.
- Examples can be used to learn LINX.
To build your applications, include the linx.h header and link
with the liblinx.a library.
5. Build LINX from the Source
When building the entire LINX package, the following will be built:
- The LINX kernel module - linx.ko
- The LINX API library liblinx.a
- Command binaries in a bin/ directory, which is created
The examples are not built by default with make. When built using
make example at the top level, the example programs are created
in the example/bin/ directory, which is created.
Note that headers in the target Linux kernel source tree must be available,
to be able to compile LINX. This is needed also when compiling for the
running Linux kernel.
Optionally, reconfigure the LINX Kernel Module
Before building, it is possible to reconfigure compile time constants
for the LINX kernel module. Things like the maximum number of remote links to
handle per node, maximum number of sockets per established remote link
and similar constants can be changed from their default values.
Information about these kernel module constants are found in
the README file; limits for configuration values are
in the RELEASE_NOTES.
Build LINX to Run on Current Host
It is easy to build LINX self hosted, e.g. for the running kernel.
Just go to the top of the LINX directory and do make:
cd /Your_LINX_Install_Path
make
which will build the LINX files.
Optionally build also the LINX examples with:
make example
Building LINX for a Selected Target, Cross-compiling
Cross compiling LINX for another target, requires that a few variables are
set accordingly, either as environment variables or by changing the file
config.mk. At least the following are needed:
- ARCH - Target architecture, e.g.
ppc, i586, ...
- CROSS_COMPILE - Cross compiler tool prefix, e.g.
powerpc-linux-
- KERNEL - Kernel source tree
In addition, your PATH environment variable must be set to reach your
cross compiler tool kit. With correct PATH, perform the cross compiling
build:
cd /Your_LINX_Install_Path
make
6. Quick Start Using LINX Remote Links
After installing LINX from the tar file and building all with make, according
to the previous section, follow this short description to create a simple LINX
link between two nodes, here called NodeA and NodeB, after which your
applications can start using LINX to communicate. See
next section for more about creating
remote links, e.g. automatically. See also the
Examples section for test applications with
source code.
Replace the Ethernet MAC addresses below
with the actual values in your two Linux nodes.
On NodeA, do the following to create a LINX link to NodeB:
- Unpack LINX and build all with make, according to
previous description.
- Load the LINX kernel module into your kernel. You need root permissions.
$ sudo insmod net/linx/linx.ko
- Create a connection to the remote node (to NodeB) with:
$ bin/linxcfg create 0b:0b:0b:0b:0b:0b eth0 LinkToB
The connection will stay in state "CONNECTING" until also
the remote side has acknowledged and completed the connection.
- Build your applications - include linx.h and link with liblinx.a.
On NodeB, do the same, but to NodeA, to complete the bidirectional connection:
- Unpack LINX and build all with make, according to previous description
previous description.
- Load the LINX kernel module into your kernel. You need root permissions.
$ sudo insmod net/linx/linx.ko
- Create a connection to the remote node (to NodeA) with:
$ bin/linxcfg create 0a:0a:0a:0a:0a:0a eth0 LinkToA
- Build your applications - include linx.h and link with liblinx.a.
Now your applications can communicate with each other, using the LINX API.
The sequence of functions calls used in the applications are shown in the
description section.
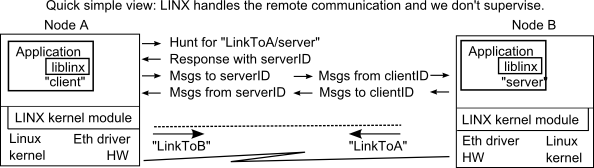
Simplified, an application in node B creates a LINX endpoint, which it calls
"server" with linx_open(3). Another
application in node A create a LINX endpoint (it's name is irrelevant here).
The A application hunts for "LinkToB/server" with
linx_hunt(3). and gets a
response from LINX with an identifier for the server, this response it read with
linx_receive(3) and contains an identifier
for the server, serverID. Finally the A application can send messages to serverID
and B will receive these to its endpoint,
linx_send(3) and
linx_receive(3),
transferred through the LINX link. Application B sees only a local identifier
(clientID) for application A and can send responses or any messages to it.
The identifiers are always local in each node.
7. Create and Supervise LINX Links to Other Nodes
Applications may want to find and communicate with other applications on
remote nodes. Each application creates a LINX endpoint with a name, through
which they can hunt for any other LINX endpoints in local or remote nodes and
communicate with them.
To reach remote nodes, LINX links with linknames must be
created between the nodes, using the LINX protocol. The name of a link
(linkname) usually is different on the two sides of the link,
often the linkname is the name of the remote node connected via the link.
Applications reach LINX endpoints on remote nodes, using hunt paths which
include the linkname, e.g. "linkname/endpointname".
Multiple linknames can be given in the hunt path to reach an endpoint,
automatically routing through
a series of LINX links.
LINX links to remote nodes are set up and manages, using the LINX
protocol. As soon as a link is active, applications can hunt for remote
application, using a hunt name consisting of the link name following by
the remote LINX endpoint name, e.g. "linktoA/app2".
After finding the remote endpoint, the communication is completely
transparent, using the received identity number of the remote endpoint.
Automatic Handling of Remote LINX Links - linxdisc Daemon
Remote links can be automatically created and supervised, using the
linxdisc(8) daemon in all nodes. This
daemon broadcasts advertisements on the local Ethernet. When receiving
advertisements from other nodes, it automatically creates links to
them.
Configuration of the remote link handing is done in the
/etc/linxdisc.conf(5) file,
or other file name if given as the linxdisc start option.
Filters in the configuration file will control which remote nodes
to which links are allowed. Some changes in the configuration can be
immediately applied, by sending SIGHUP to the linxdisc daemon.
Setting up LINX Links to Remote Nodes - linxcfg Command
The linxcfg(1) command can be used to
create or destroy LINX links to remote nodes.
This command must be used on both sides to complete a connection - the
status will be "connecting" until also the other side has created its side
of the connection. The linxstat(1) command
can be used to check the status.
LINX Status Display - linxstat Command
Status information from the LINX kernel module can be displayed, using
the linxstat(1) command. Status is
shown for local and remote LINX endpoints, as well as LINX links to other
nodes. The information includes queued signal buffers, pending attaches
and pending hunts.
8. Examples - Using LINX with Applications
Running the Simple LINX Example
This example is included in the LINX distribution and consists of a
client/server application. One or many client can be run on one
or many different nodes, while one program is started as a server
on one node. The server can be terminated and restarted, the clients
will receive notifications about the server and can resume operation
whenever it sees that the server is available. The actual operation
is simple, the client sends a message and the server answers.
Run the Simple Example on one Node - no links between nodes are
needed here:
- Compile LINX on the node, as earlier described and install
the LINX kernel module
make
sudo insmod net/linx/linx.ko
- Start the server in the background and start the client in the
foreground. Ask the client to send 10 requests:
example/bin/linx_example_server &
example/bin/linx_example_client -n 10
Run the Simple Example on Two Nodes:
- Compile LINX on each node, or cross compile for the nodes, as
earlier described.
If not compiled locally, transfer the LINX kernel module, the linxcfg
command and the LINX example to the two nodes. Modify the paths below
if needed.
make
- On each node, install the LINX kernel module
sudo insmod net/linx/linx.ko
- On each node, start linxcfg, giving the device name and the MAC-address
of the other node and any suitable linkname. Below as example we use
the MAC-addresses 0a:0a:0a:0a:0a:0a and 0b:0b:0b:0b:0b:0b and the
device eth0 in both nodes. We select the linkname srvnode for the
link to the server node. Any linkname can be used for the link from
the server to the client node, as it is not used in this example.
On server node:
sudo bin/linxcfg create 0a:0a:0a:0a:0a:0a eth0 srvnode
On client node:
sudo bin/linxcfg create 0b:0b:0b:0b:0b:0b eth0 anynode
- On server node, start the server
example/bin/linx_example_server
- On client node, start the client. Tell the client the linkname
for the link to the server node.
example/bin/linx_example_client -n 10 srvnode
9. Reference Manuals - LINX for Linux
The reference manual pages for LINX are under the LINX doc/
directory, in the man1 - man8 subdirectories.
The linx(7) manual page is the top document.
The linx.h(3) and
linx_types.h(3)
are included in you applications.
To read these with the man command in Linux, you need to
add the path to the doc/ directory to your MANPATH environment variable.
Example, reading the linx(7) manual page:
MANPATH=/Your_LINX_Install_Path/doc man linx
Alternatively instead use index.html in the LINX
doc directory to read the HTML version of the reference manual pages, which
were created from the man page format files. The MAN pages are the originals
and any changes must be done there. You might want to check first, that the
HTML files have been recreated after the latest changes of the manual pages.
LINX API
The LINX API is described in the manual pages
(index.html).
LINX Socket API
The LINX Socket API is described in the
linx(7) manual page.
LINX Commands for Configuration, LINX Links Handling and LINX Status
The linxcfg command,
the linxdisc daemon and
the linxdisc.conf file, as well as
the linxstat command are
described in their manual pages.
10. LINX Kernel Module Configuration
Parameters can be passed to the LINX kernel module (linx.ko) at load time.
For example:
insmod linx.ko MAX_NUM_LINKS=64
To list available parameters and types, the modinfo command can be used:
modinfo -p linx.ko
The following parameters can be passed to the LINX kernel module:
max_num_links
Specify the maximum number of links handled by LINX per node. When the
maximum number of links is reached, new links will be refused to be
created. The default value is 32 and max is 1024.
max_sock_per_link
Specify the maximum number of sockets/spids per established link. If
the maximum number of sockets/spids is reached for a specific link,
the link will be disconnected and reconnected. The default value is
1024 and max is 65536.
linx_spid_max
Specify the maximum number of sockets/spids per node. When the maximum
number of sockets/spids is reached, new sockets/spids can not be
opened. If the maximum number of sockets/spids is reached for a
specific link, the link will be disconnected and reconnected. The
linx_spid_max value needs to be a power of 2. The default value is 512 and max is 65536.
linx_osattref_max
Specify the maximum number of pending attaches per node. When the
maximum is reached, attach calls will fail. If the maximum number of
sockets/spids is reached for a specific link, the link will be
disconnected and reconnected. The linx_osattref_max value needs to be a
power of 2. The default value is 1024 and max is 65536.
linx_sockbuf_max
Specifies the send and receive buffer queue size of a Socket.
This value is passed to the socket struct fields socket->sk_sndbuf and socket->sk_rcvbuf.
These fields control the total number of memory a socket may use
for sending and receiving packages. The default value is 1073741824 and max is 1073741824
11. Other Links and Documents
LINX Support and Information
Email: linx@enea.com
Other Documentation
See www.enea.com for general information
about LINX. You will find a LINX Datasheet, the LINX protocols described,
Questions & Answers about LINX and other information.
Current version is also seen in document header when printed (HTML title line).
Revision |
Author |
Date |
Status and Description of purpose for new revision |
1.1.0.1 |
lejo |
2007-04-09 |
Minor doc format adjust |
1.1.0 |
lejo |
2006-10-30 |
For LINX for Linux 1.1. |
1.0.3 |
lejo |
2006-09-14 |
For LINX for Linux 1.0. |
To print this document from an HTML browser, it is recommended to use
Firefox or IE6, which will print this with reasonable page breaks.